|
|
|
|
|
|
NASA’s Mars lander has returned its first full 360 degree panoramic image from the frigid Martian surface, freed its long robotic arm in preparation for digging the icy plains, tested various instruments and transmitted its second weather report, all in a day’s work.
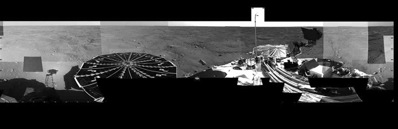
This panoramic view taken by Phoenix shows the sweeping plains of the Martian northern arctic. Image: NASA/JPL-Calech/University of Arizona. After a small transmission glitch earlier in the week, commands were finally received by Phoenix to rotate the robotic arm's wrist to unlatch its launch lock, raise the forearm and move it upright to release the elbow restraint, the first time the arm has been moved in about a year, bringing the mission to a significant milestone. "We have achieved all of our engineering characterisation prerequisites, with all the critical deployments behind us," says Barry Goldstein, Phoenix project manager. "We're now at a phase of the mission where we're characterising the science payload instruments. That's a very important step for us."
Phoenix self-portrait and fish-eye view of the horizon. North is up. The image composite is made up of images from sols 1 and 3 (where a sol is the name of a Martian day). Image: NASA/JPL-Caltech/University of Arizona. The robotic arm will give itself a health check by testing its joints at a range of warmer and cooler temperatures before performing its first major assignment to use its camera to look under the spacecraft to assess the terrain and underside of the lander. The robotic arm will later trench into the icy layers of the northern polar surface and deliver samples to instruments that will analyse what this part of Mars is made of, what the water content is like, and whether it is, or has ever been, a possible habitat for life. One of the latest images to be returned from the plucky lander – a full 360 degree panorama of the landing site – will help the project team decide where to dig first and which spots to leave for later. Scientists have already started naming various features of interest, and have assigned fairy tale nicknames to a selection of rocks and trenches.
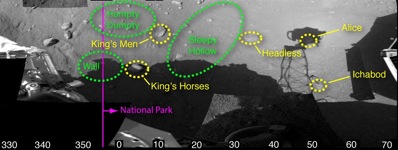
A fairy tale landscape. Fairy tale nicknames have been assigned to features shown in the region reachable by the robotic arm. For example, "Sleepy Hollow" is a trench and "Headless" is a rock. A "National Park," marked in purple, has been set aside for protection until scientists and engineers have tested the operation of the robotic scoop. First touches with the scoop will be to the left of the "National Park" line. Rocks are circled in yellow, other areas of interest in green. Image: NASA/JPL-Caltech/University of Arizona. Another important mission milestone included the activation of the laser instrument ‘lidar’ (light detection and ranging), a critical component of Phoenix's weather station, provided by the Canadian Space Agency. The instrument, which is designed to detect dust, clouds and fog by emitting rapid pulses of green laser-like light into the atmosphere, which bounces off particles and is reflected back to a telescope, shows dust aloft to a height of 3.5 kilometers. The weather at the Phoenix landing site on the second day following landing was sunny with moderate dust, with a high of minus 30 degrees Celsius and a low of minus 80. |
|
|
|
||||||||||||||||||||||||||||||||||||||||||